
Um von Schritt 3 nach Schritt 4 zu gelangen, muss der Sensor B1 5s lang bedämpft sein.
Was passiert jedoch, wenn Sensor B1 schon für 5s bedämpft war, während der GRAFCET noch im Schritt 2 war und erst später in den Schritt 3 wechselt?
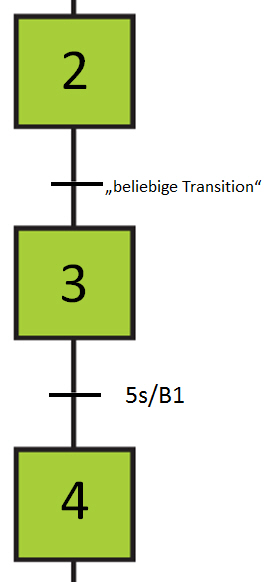
B1 muss für 5s bedämpft bleiben
Lösung:
Die Transitionsbedingung 5s/B1 gilt als erfüllt, nachdem Sensor B1 5s lang true war (und weiterhin true bleibt). Im nebenstehenden Beispiel könnte dieser Zustand eintreten, während Schritt 2 aktiv ist. Wechselt die Steuerung später in den Schritt 3, so wird die (schon erfüllte) Transition 5s/B1 freigegeben, die Steuerung gelangt umgehend in den Schritt 4.
Schritt 3 wird somit als „instabiler Schritt“ bezeichnet. Es liegt ein sog. „transienter Ablauf“ vor.
Anmerkung: Diese Fragestellung wird irrelevant, wenn anstatt eines Sensors eine Schrittvariable verwendet wird. Also z.B. 5s/X3. Denn dann ist klar, dass die 5s erst dann ablaufen, wenn X3 erreicht wurde.
Die Transition wird erst dann wieder als „false“ betrachtet, wenn B1 seinen Signalzustand von 1 auf 0 wechselt.
Möchte man das zweideutige Verhalten des obigen GRAFCETs verhindern, hat man hierzu mehrere Möglichkeiten.