
Mit beiden Grafcets soll eine einfache Schaltung „Motor in Selbsthaltung“ realisiert werden. Nach dem Signal „Start“ soll der Motor solange den Zustand „EIN“ besitzen, bis das Signal „Stopp“ den Motor abschaltet, ihn also in den Zustand „AUS“ versetzt.
Am Beispiel des linken Grafcets soll deutlich werden, dass es nicht nur sinnlos ist, für diese Zwecke zwei boolsche Variablen zu verwenden, sondern dass diese Verwendung sogar falsch ist, da sich dadurch ein widersprüchliches Verhalten ergibt:
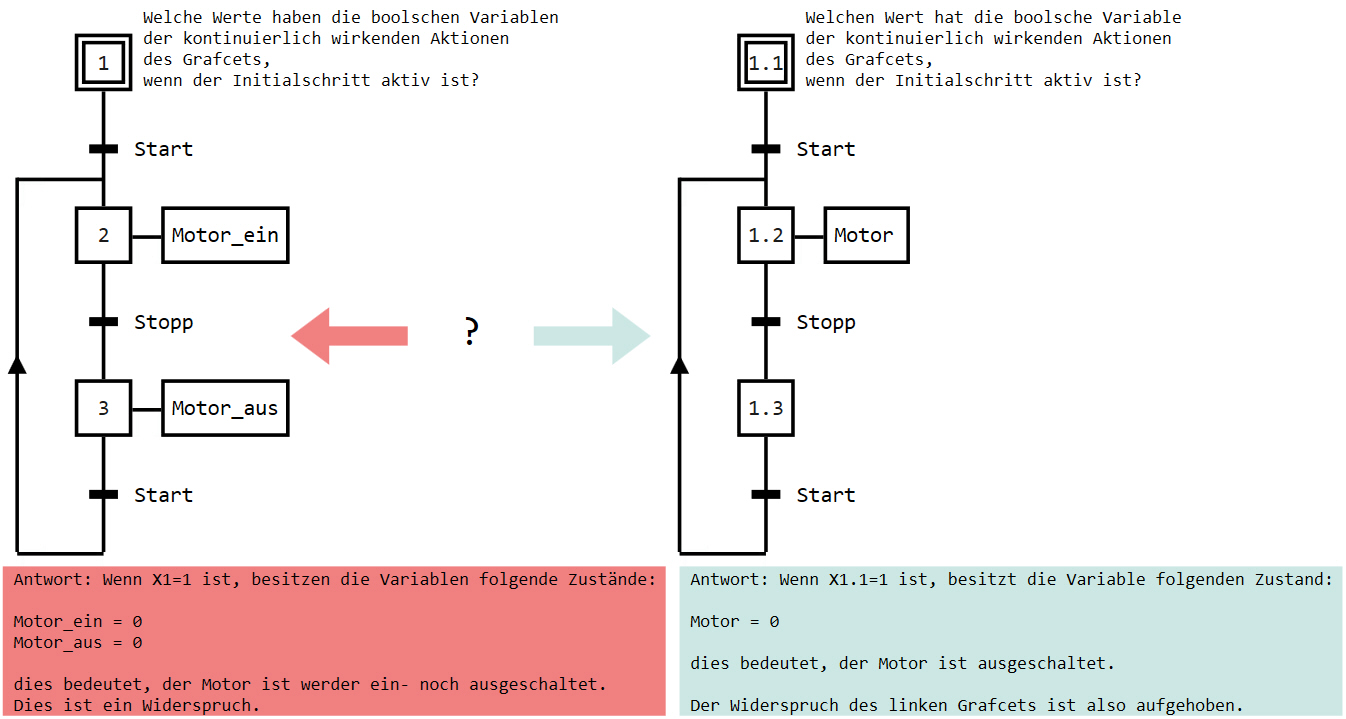
Boolsche Variablen können im Grafcet Widersprüche erzeugen
Anmerkung: Wenn man in obigen Grafcets die Transtionsbedingung „Start“ ersetzt durch „Start & nicht-Stopp“, verhindert man so einen transienten Ablauf bei gleichzeitiger Betätigung von „Start“ und „Stopp“.
Der Blogeintrag Grafcet 21 erläutert ein weiteres Problem, dass bei der Verwendung von kontinuierlich wirkenden Aktionen entstehen kann.